
EPFL-Roboterhand löst sich vom Arm und krabbelt eigenständig
25.01.2026 - 10:22:12 | boerse-global.de
{kind=link}
Forscher in Lausanne präsentieren einen manipulierenden Roboter, der sich abkoppeln kann, um in engen Räumen zu arbeiten – eine fundamentale Neuausrichtung der Robotik.
Lausanne – Was klingt wie eine Szene aus „Die Addams Family“, ist ein echter Durchbruch: Wissenschaftler der ETH Lausanne (EPFL) haben eine Roboterhand entwickelt, die sich von ihrem Arm lösen kann. Eigenständig krabbelt sie dann wie eine Spinne zu ihrem Ziel, greift Objekte und dockt wieder am Arm an. Die Studie im Fachjournal Nature Communications beschreibt einen Paradigmenwechsel weg von starr verbundenen Systemen.
Vom Greifer zum Krabbler: Das Ende der physischen Leine
Das zentrale Problem bisheriger Roboter ist ihre Reichweite. Der Greifer ist fest mit dem Arm verbunden. Das Team des Learning Algorithms and Systems Laboratory (LASA) um Professorin Aude Billard durchbrach diese Grenze. „Die menschliche Hand ist zwar geschickt, aber durch den Arm limitiert“, erklärt Billard. „Indem wir diese Verbindung trennen, kombinieren wir die Stärke eines Arms mit der Agilität eines kleinen, mobilen Roboters.“
In engen, gefährlichen Anlagen wie Chemieanlagen oder Rechenzentren kann eine fundierte Gefährdungsbeurteilung den Unterschied zwischen sicherem Einsatz und teurem Zwischenfall ausmachen. Der kostenlose Leitfaden erklärt praxisnah, wie Sie Gefährdungsbeurteilungen erstellen, mit fertigen Vorlagen und Checklisten für Inspektionen in schwer zugänglichen Bereichen – ideal für Sicherheitsverantwortliche, die Roboterwartungen und Nachinspektionen rechtssicher planen wollen. Gefährdungsbeurteilung jetzt kostenlos herunterladen
Der Clou: Die Finger der Hand dienen im abgelösten Zustand als Beine. Ein neuartiger „Hand-Krabbel-Mechanismus“ ermöglicht es dem Gerät, durch unwegsames Gelände zu navigieren, hinter Hindernisse zu gelangen oder in Lücken zu schlüpfen, die für den gesamten Arm unzugänglich sind. Die Rückkehr an den Arm geschieht über eine magnetische Andockstation und ausgeklügelte Pfadplanungs-Algorithmen.
Symmetrisches Design meistert Mehrfach-Griffe
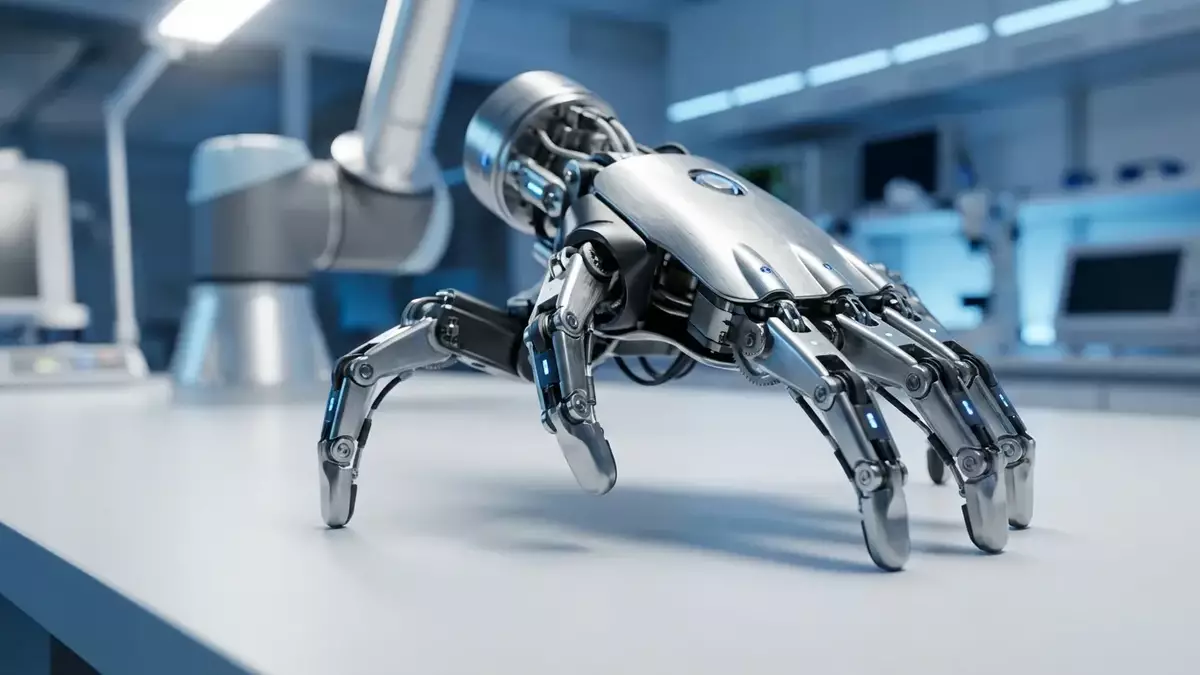
Statt einer menschlichen Hand mit Daumen nachzueifern, setzten die EPFL-Ingenieure auf radikale Symmetrie. Ihre Hand besitzt fünf bis sechs identische, mehrgelenkige Finger, die ringförmig um eine runde „Handfläche“ angeordnet sind.
Dieses Design ist der Schlüssel zu ungewöhnlicher Vielseitigkeit. Jede beliebige Kombination von zwei Fingern kann eine Zangengreifbewegung ausführen. Das erlaubt es der Hand, Objekte aus vielen Winkeln zu packen. In Tests konnte sie bis zu vier verschiedene Gegenstände gleichzeitig halten – eine Aufgabe, die für menschliche Hände oder konventionelle Greifer kaum zu bewältigen ist.
Revolution für Industrie und Rettungseinsätze
Die Anwendungen dieser Technologie sind vielfältig und praktisch. In der Industrie könnte ein solcher Roboter Wartungsarbeiten in engen, gefährlichen Umgebungen übernehmen. Stellen Sie sich eine Chemieanlage oder ein Rechenzentrum vor: Der Roboterarm bleibt außen, während sich die Hand löst, um in Maschinen hineinzukriechen und Leitungen oder Kabel zu inspizieren.
Noch dringlicher ist der Nutzen für die Rettungsrobotik. Bei einem eingestürzten Gebäude, blockiert von Trümmern, könnte ein Rettungsroboter seine Hand abkoppeln. Diese würde sich dann durch schmale Spalten zwängen, um Überlebende zu lokalisieren oder kleine Notfallausrüstung wie Wasser oder Kommunikationsgeräte zu bringen.
Modular statt nur sensibel: Ein neuer Trend?
Die Entwicklung fällt in eine Phase intensiver Innovation in der Robotik. Während große Konzerne oft die Sensorik oder „hautähnliche“ Empfindsamkeit fester Hände verbessern, setzt der EPFL-Ansatz auf strukturelle Modularität. Das Feld der modularen Robotik existiert lange, doch robuste, praxistaugliche Beispiele waren rar.
Dieser Prototyp hebt signifikante Lasten, selbst im Krabbelmodus. Damit unterscheidet er sich von früheren, zerbrechlichen Experimenten. Der nächste Schritt? Noch mehr Autonomie. Aktuell benötigt die Hand noch teilweise vorgeplante Wege oder Fernsteuerung. Ziel sind eine integrierte Stromversorgung und verbesserte Sensoren direkt in der Hand, um längere unabhängige Einsätze zu ermöglichen.
Bis zur Marktreife wird es noch dauern. Doch das Prinzip – ein Roboter, der mehr ist als die Summe seiner fest verbundenen Teile – könnte die nächste Generation von Servicerobotern entscheidend prägen. In einer Welt, die immer enger und unzugänglicher wird, ist eine Hand, die sich selbstständig macht, vielleicht genau das, was die Branche braucht.
Übrigens: Wenn Roboter in oder neben chemischen Anlagen eingesetzt werden, sind spezielle Gefährdungsbeurteilungen für Gefahrstoffe Pflicht. Das kostenlose E‑Book zur Gefährdungsbeurteilung für Gefahrstoffe bietet bearbeitbare Checklisten, eine Risikomatrix und konkrete Maßnahmen für sichere Inspektionen und Reparaturen in Chemieanlagen – praktisch für Arbeitsschutz-Verantwortliche, die Einsätze mit abkoppelbaren Servicerobotern planen. Jetzt Gefahrstoff-Checkliste herunterladen